Projects
Vision-Driven Robotic Manipulator: A Gateway to precision-based Automation
Hover over this text to see more details!
Project Overview:
Robot Localization: Kalman Filter and Particle Filter
Hover over this text to see more details!
Project Overview:
 Pybullet
Pybullet
Autonomous Robot for Warehouse-Like Environment
Hover over this text to see more details!
Project Overview:
 c++
Pybullet
c++
Pybullet

 git
git
Evaluation of grasp stability using friction cones for Kuka Robot
Hover over this text to see more details!
Project Overview:
Pybullet
Object Detection in Cluttered Environments with RPN and Mask R-CNN
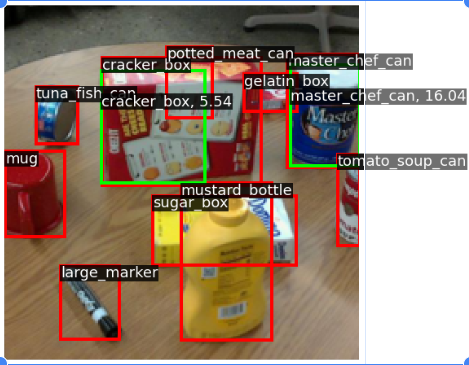
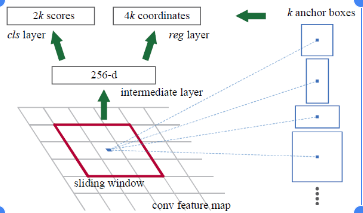
Hover over this text to see more details!
Project Overview:
Pybullet
Robotic Manipulation: A Model-Based Approach for Dynamic Planning and Control
Hover over this text to see more details!
Project Overview:
c++
Pybullet